[자동운전] 인지(Perception)- GPS/IMU를 이용한 위치인지 GPS의 장단점
- 장점 1. 위치 파악에 상당히 정확함.
- 단점 1. 업데이트 주기가 10Hz로 위치 파악에 소요되는 시간이 매우 길다.
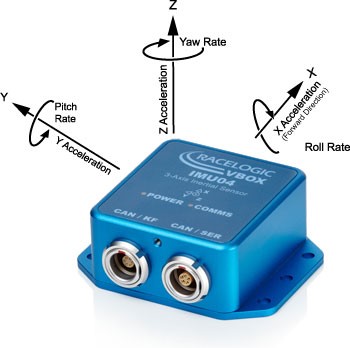
- IMU장/단점

장점 1. IMU는 업데이트 주기가 200Hz 이상으로 위치를 파악하는데 소요 시간이 매우 짧다.
- 단점 1. 시간의 흐름에 따라 누적 오차가 발생하는데, 이 누적 오차는 추정치의 정확도를 점점 낮춘다.
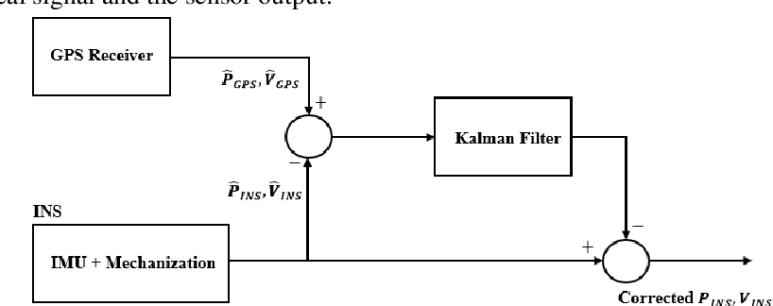
- GPS와 IMU를 융합한 인지(Perception) 모델-Propagation and updata model GPS는 위치를 업데이트 하는데 100ms(0.1초)라는 시간이 걸리는 반면 IMU는 위치를 업데이트하는데 불과 5ms(0.05초)밖에 걸리지 않는다. 그렇기 때문에 어느 하나만 사용하는 것보다 어느 쪽이든 어느 쪽이든 사용함으로써 위치를 정확하고 빠르게 파악할 수 있다.
따라서 이 둘의 장점이다 털을 결합해 최신 위치정보를 실시간으로 정확하게 제공받을 수 있도록 “칼만필터-Kalman Filter”라는 기법을 활용하고 있다.
동작원리에 대해 간단히 설명하면 아까 얘기했다.시피 IMU는 5ms마다 최신 위치정보를 파악하는 데 비해 오차가 계속 누적되고 GPS는 100ms라는 오랜 시간이 걸리는 데 비해 상당히 정확한 최신 위치정보를 찾는다. 이 때문에 IMU에서 측정해 생기는 오차를 100ms 주기로 GPS로 보정해 보다 정확한 현지화가 가능해지는데 이를 카르만 필터 기법이라고 부른다.
단지, 이 카르만 필터 기법으로부터 얻은 위치 정보는 믿을 수 없다.이에 대한 한계를 이하에서 살펴보기로 한다.
▲카르만 필터 기법의 한계=GPS는 IMU에 비해 훨씬 정확하지만 그래도 자율주행에 사용할 만큼 정확하지는 않다. 아무리 정확한 GPS 기술이라도 1m 범위 내의 오차를 갖고 있다.
2. GPS 신호는 다중패스(multipath) 문제를 갖고 있다. 즉 GPS 신호가 건물에 반사되는 경우가 많은데 GPS 신호가 건물에 반사되면서 노이즈가 증가하고 이는 위치 오차를 더 크게 만든다.
3. GPS는 위성과 통신해 위치를 파악하기 때문에 하늘에 가려진 곳의 위치는 GPS 값을 정확하게 받지 못한다. → 이는 자동차나 휴대전화가 터널이나 지하철에 있을 때 GPS가 작동하지 않는 이유이기도 하다.
결론은 GPS/IMU를 활용한 카르만 필터 기법은 위치 파악에 좋지만 자율주행에 쓰일 만큼 정확하지는 않다. 이에 카르만 필터 기법에 의한 위치 파악(로컬라이제이션-localization)은 자율주행에서는 도움이 되지 않으므로 이를 보완하기 위해 카메라를 활용한 현지화, 그리고 라이더를 활용한 현지화가 나오는데 이는 다음 문장에서 살펴보기로 한다.