R&S®SMBV100B GNSS Simulator를 AVL DRIVING CUBE™툴체인에 통합하여 차량레벨에서 첨단운전자보조시스템과 자율주행기능을 전혀 새로운 방법으로 검증할 수 있습니다. 완성차의 물리 센서 시험 시스템을 차량 테스트 베드에서의 시험 과정과 결합하면 신속하고 재현할 수 있으며 비용 효율적인 테스트를 실시할 수 있습니다. 현실적이고 안전한 조건에서 가능한 모든 주행 시나리오를 실행할 수 있습니다.
정보
자동차 산업에서 자율주행자동차 관련 부문이 점점 늘어나고 있습니다. 사용이 끝난 레벨 2 ADAS(advanced Driver Assistant Systems) 및 부분 자율 주행으로부터 장래의 완전 자율 주행(AD:Autonomous Driving)까지, 기능의 복잡성이 크게 증가하고 있습니다. 가능한 모든 조건과 변동 환경에서 이러한 기능을 검증하기 위해서는 자동차 개발 분야에서 많은 과제를 해결해야 합니다.
R&S ® SMBV 100B GNSS Sim ulator
예를 들면 AEB(Autonomous Emergency Braking), ACC(Adaptive Cruise Control)등의 기능, 고속도로의 자율 주행등의 풀 오토 기능은, 자동차 내부의 수많은 상황이나 차량의 구성에 의해, 대단한 양의 기능적·비기능 검증 및 최적화가 필요합니다.
이러한 기능의 기능적 안전을 보장하기 위해 수천 수만 킬로미터의 주행거리와 복잡한 시나리오를 테스트할 필요가 있으므로 보다 첨단화된 검증방식이 요구되고 있습니다.
오늘날 ADAS 및 AD를 검증하는 방법은 기본적으로 세 가지입니다. 일반적으로 일반 도로 또는 주행 시험로(Proving Ground)에서 주행 테스트로 수행하는 방식과 HiL(Hardware-in-the-Loop) 방식의 테스트가 있으며 순수한 가상의 소프트웨어 기반 시뮬레이션 테스트, 즉 하드웨어 구성 요소 없이 수행하는 방식이 있습니다.
주행시험로 또는 일반 도로에서 시행하는 테스트는 현실적이지만 완전히 재현되지 않아 시험운전자와 다른 테스트 참가자에게 위험할 수 있습니다. 또, 주행 시험로에서 다음의 테스트 주행까지 시나리오를 리셋하려면 많은 시간이 필요합니다. HiL 기반 테스트는 실제 ECU(Electronic Control Unit)와 기능을 사용하지만 차량의 나머지 부분에 대한 복잡한 시뮬레이션이 필요하기 때문에 셋업은 어렵습니다. 순수 시뮬레이션은 매우 생산적이고 효율적이며 유연합니다. 그러나 가상 테스트에서는 물리적인 요소를 사용하지 않으므로 검증의 중요성이 매우 높은 차량 시스템 간의 실제 상호작용을 테스트하지는 않습니다.
ADAS 및 AD검증방법
검증 방법 장단점 분야 주행 시험로 또는 일반 도로에서 주행 테스트 모든 구성 요소를 실제 환경에서 테스트 재현 불가, 위험하며 많은 비용 소요 실험실 완전한 차량을 이용한 ViL 테스트 이 문서에서 설명
실험실 구성요소 레벨 HiL 테스트 실제 하드웨어를 사용하면서 유연하고 재현가능 복잡한 셋업 실험실 하드웨어 부품 없이 소프트웨어 시뮬레이션 유연하고 효율적이며 경제적 시스템 간의 실제 상호작용을 테스트하지 않는다.
각 방식의 단점들은 대부분 ViL(Vehicle-in-the-Loop) 방식으로 해결이 가능하며, 이 방식에 대한 자세한 설명은 아래에 나와 있습니다.
로데슈발즈 및 AVL 솔루션
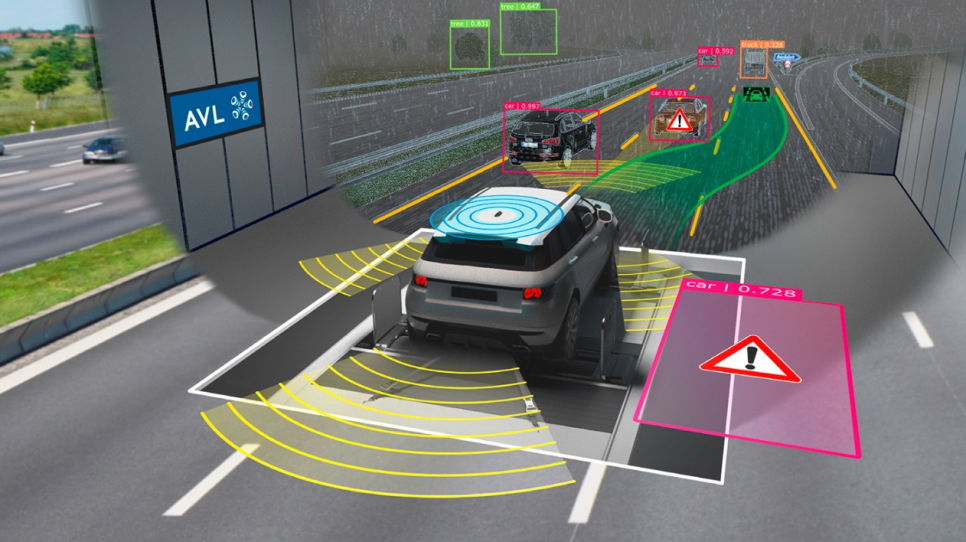
AVL DRIVING CUBE™는, 실제의 도로 테스트와 시뮬레이션간의 차이를 해결하는 여러가지 검증 방식을 제공합니다. 개별 구성 요소를 기반으로 하는 순수 HiL 방식과 달리, 이 방식은 가상 실험 환경에서 즉시 주행 가능한 차량을 테스트합니다. 테스트 대상 컨트롤 유닛은 물리 또는 동작 센서 모델(즉 소프트웨어 시뮬레이션에서 발생한 센서 출력을 ECU로 공급) 혹은 물리 센서 시뮬레이터에 의해 시뮬레이션 환경에 접속됩니다. 이 테스트 환경은 모든 유형의 ADAS 및 AD 기능(예: Predictive ACC 모델에서 작동 시 차량을 자동으로 가속 또는 감속)을 평가하도록 설계되었습니다.
테스트 베드에서는 실제의 도로보다 시나리오를 훨씬 간단하게 재현할 수 있기 때문에, AVL DRIVING CUBE™는 검증 및 최적화 중 ADAS 및 AD 기능의 효율성을 높입니다. 또한 작동 중에는 차량에 접근이 용이합니다. 실제 도로에서는 실행 불가능한 심각한 상황을 안전하게 검증할 수 있습니다. 특히 센서 시뮬레이션과 자극 시스템은 복잡한 주행 시나리오의 정확한 검증을 위해서 중요합니다.
AVL DRIVING CUBE™를 이용한 ADAS · AD기능 테스트
R&S®SMBV100B를 이용한 GNSS수신기 자극신호
R&S®SMBV100B GNSS Simulator를 사용하면 실제 GNSS RF신호를 통해 차량에 탑재된 GNSS 시스템에 신호를 보내 검증 환경을 넓힐 수 있습니다. 따라서 Predictive ACC(Adaptive Cruise Control)나 H2H(Hub-to-Hub) 작동과 같은 항법 및 지도 기반의 ADAS 및 AD 기능을 테스트할 수 있습니다.

Predictive ACC(Adaptive Cr uise Control) 테스트 셋업 R&S® SMBV100B는 GPS, Galileo, GLONASS, BeiDou 등의 모든 글로벌 항법 위성 시스템과 다양한 SBAS(Satellite Based Augmentation System)용 신호를 생성할 수 있습니다. 60개의 가용 채널을 사용해 여러 GNSS 위성이 존재 가능하며 현실적인 Constellation을 쉽게 설정할 수 있습니다.
또한 모든 주파수 대역(예: L1, L2, L5)에서 동시에 신호를 발생시켜 최신 다주파 GNSS 수신기의 통합 및 검증이 가능합니다.
위성의 가시성과 전력 수준을 즉시 조정할 수 있기 때문에 차폐 및 차단된 GNSS 신호를 추가로 모델링할 수 있습니다. R&S® SMBV100B GNIS Simulator는 LAN, USB, GPIB 인터페이스를 통해 테스트베드에서 발생한 원격명령을 수신합니다. GNSS 시뮬레이션에 필요한 위치 및 자세 데이터를 SCPI 또는 UDP 명령을 사용하여 시뮬레이터로 스트리밍할 수 있어 AVL DRIVING CUBE™에 쉽게 통합할 수 있습니다.
최고 100Hz의 높은 스트리밍 속도와 최저 20ms의 낮은 명령 처리지연 속도가 결합되어 빠른 처리와 신호 정확도를 보장합니다.
ViL 환경에서 트랙용 Predictive ACC 기능 테스트
AVL DRIVING CUBE™는 연비 검증, Predictive ACC 기능이라고 하는 ADAS 시스템의 개발을 간소화할 수 있습니다.
Predictive ACC 기능은 지리적 고도 지도와 GNSS 수신기가 계산한 실제 트랙 위치를 바탕으로 전면 도로의 위상을 고려합니다. 이후 전 경로에 대해 최적의 에너지 소비를 달성하기 위해 차속과 엔진 작동 전략을 조정합니다.
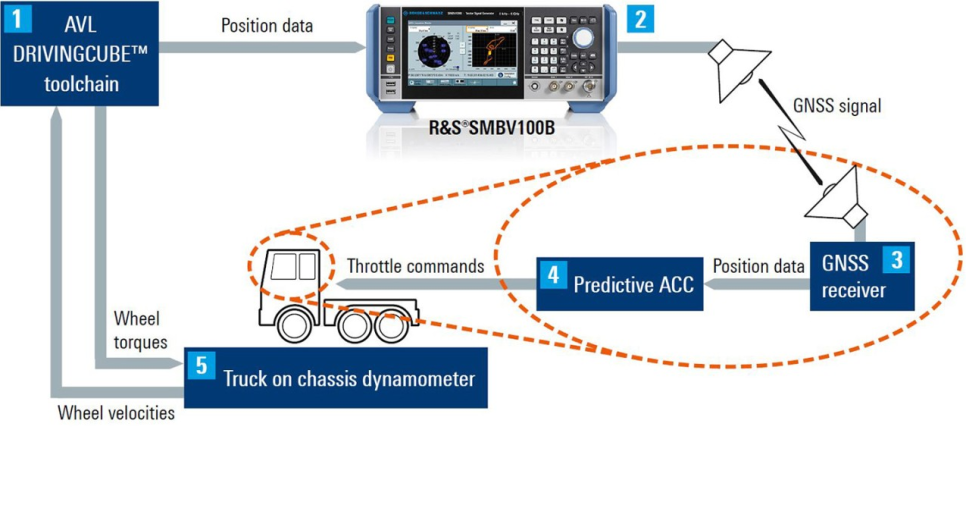
로데슈발즈와 ACC는 Predictive ACC의 기능을 테스트하기 위해 스톡홀름에서 트럭용 섀시 동력계에 상술한 툴체인을 설치했습니다.

AVL과 로데슈발즈는, 첨단 운전 보조 시스템 및 차량 수준 자율 주행 기능 부문의 기술 파트너입니다.
AVL DRIVING CUBE™가상 환경에 지리적 맵을 사용해 가상 트랙을 주행할 트랙을 만듭니다. ACC 기능(4)이 통제하는 물리적 트럭의 이동을 섀시 동력계(5)가 기록한 후 시스템 컨트롤러 (1)로 전송합니다.
시스템 컨트롤러가 가상 트랙에서 트랙 모델의 주행을 기반으로 예상되는 주행 저항을 계산합니다. 이후 동력계가 제공하는 저항을 설정하고 물리적 트럭으로 주행 저항을 다시 투영합니다.
전송된 물리적 트럭의 이동 기반으로 트럭에서 가상 트럭의 위치가 업데이트됩니다. 그 후 이 위치데이터가 R&S®SMBV100B(2)로 전송되며, 이 기기에서 해당 GNSS 신호가 생성됩니다. GNSS 신호가 물리적 트랙의 GNSS 수신기(3)로 공급되며, GNSS 수신기는 수정된 위치를 계산한 후 ACC 기능이 작동 전략을 적절히 조정하도록 합니다.
그 결과 스웨덴에서 이 툴체인을 사용한 테스트베드로 실제 트럭을 주행하면서 독일 도로에서 가상 트럭 주행 테스트를 실시할 수 있었습니다. GPS 무선 신호 생성을 위해 R&S® SMBV100B GNSS Simulator가 사용됩니다.
주된 이점
차량 레벨에서 수행하는 모든 주행 테스트는 실험 상황에서 매우 높은 재현성을 가진, 특히 위험한 조종의 작동 조건이 100% 안전, 빠른 업데이트 속도, 낮은 지연 시간, 뛰어난 신호 및 처리 정밀도의 GNSS 시뮬레이션, 지구 어디서나 모든 위성 Constellation에서 시뮬레이션 가능, 모든 GNSS 주파수 대역의 GPS, Galileo, GLONASS, BeiDou 지원 신호 차폐 및 멀티패스 시뮬레이션
이 테스트 셋업은 기존의 ADAS/AD 검증 및 테스트와 비교하여 다양한 장점이 있습니다. 모든 구성요소는 시험주행로 테스트와 동일한 방식으로 차량 레벨에서 테스트합니다. 그러나 이 방식은 HiL (Hardware-in-the-Loop) 테스트와 같이 유연하고 재현이 가능하며 실험실 환경과 같이 효율적인 테스트 셋업에서 활용할 수 있습니다.
출처>로데슈발즈 홈페이지
추가 자료가 필요하시면 아래 연락처로 연락주시면 제공해 드립니다.
또한 대여나 구입이 필요하신 분은 연락 주시면 신속하게 응대를 할 수 있도록 노력하겠습니다.
문의 : 031-756-0890
E – mail : sale 2 @ b road-tek.com
Website : www.rfmarket.co.kr
감사합니다
#로데슈발즈 #휴대용스펙트럼분석기 #스펙트럼분석기 #측정장비 #rohdeschwarz #오실로스코프 #VNA #NetworkAnalyzer #네트워크분석기 #신호발생기 #휴대용네트워크분석기 #파워공급기 #EMC #EMI