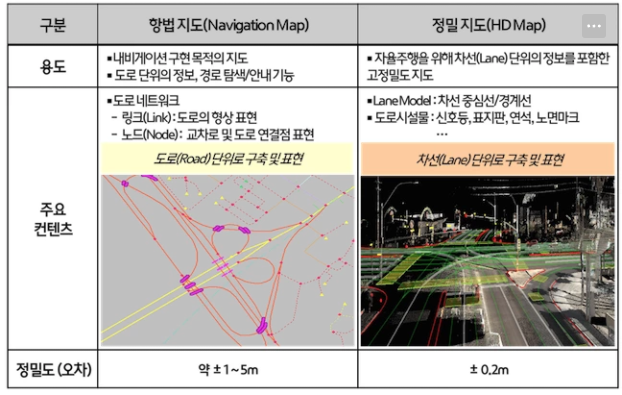
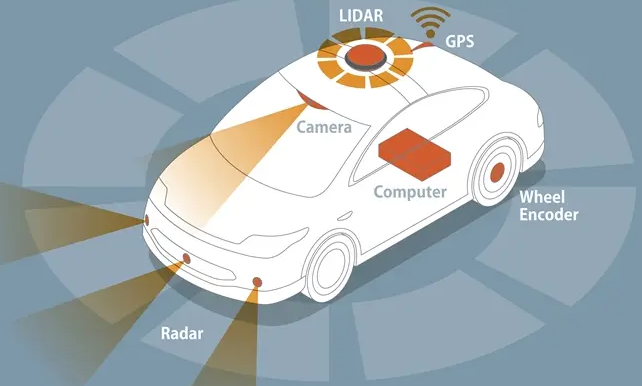
자율주행과 라이더 테슬라를 제외한 대부분의 자율주행업체는 라이더를 사용한다. 여기에 카메라 레이더 등 여러 센서와 정밀지도(HD Map)를 함께 사용한다. 라이더와 정밀지도는 1인치 단위의 정확도와 데이터를 제공하기 때문에 안전성에 대한 요구 기준이 상대적으로 높은 전통 완성차 업체들이 선호하는 방식이다.
신생 전기차의 스타트업은 데이터 수집에 대한 어려움이 크기 때문에 라이더를 선호할 수밖에 없다. 이들은 대부분의 자율주행차를 팔기 전에는 실주행 데이터 수집이 어렵기 때문에 라이더를 이용한 기술을 먼저 개발한다. 자율주행 서비스를 시작한 뒤 데이터 순환구조를 구축하는 전략을 선택한다. 물론 정밀지도를 구축하고 유지하는 비용과 시간이 크다.
라이더 센서란?라이더는 과거 항공기에 사용하는 용도로 개발된 센서로 정교한 공간분해능을 기반으로 높은 정밀도를 가지고 있다.
레이더가 전파를 이용해 물체와의 거리 및 형태를 측정한다면 라이더는 유사한 원리의 구조이지만 레이저 빔을 이용한다. 레이저 펄스의 도달 시간을 측정하고 반사 시점의 공간 위치 좌표를 계산한다. 대상 물체의 특성에 따라 레이저빔이 반사되는 시간도 다르기 때문에 물체 형태 이상의 3차원 정보를 추출할 수 있다.
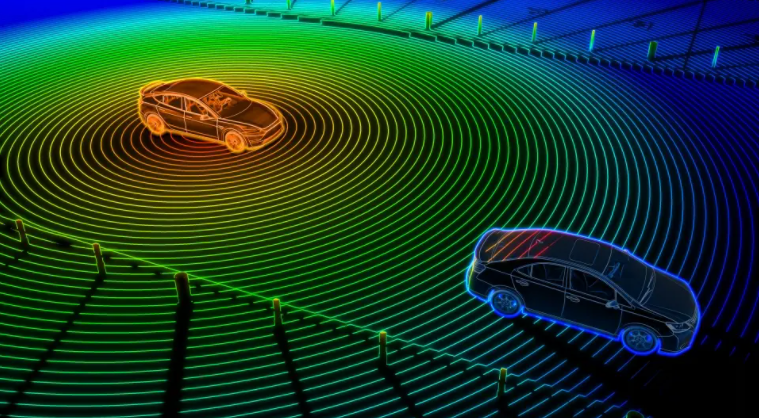
라이더 센서의 분류 라이더는 레이저를 360도로 초당 수십 바퀴를 회전시켜 전 방향을 감시하고 이미지화하는데 이 방식에 따라 기계식 라이더와 고정식 라이더로 분류된다.
- 기계식 라이더:틸팅 모터와 회전 모터로 거울의 방향을 바꿔 레이저의 방향을 제어하는 방식이다. 360도의 시야를 확보할 수 있다는 장점이 있다. 그러나 구성이 복잡할 뿐 아니라 전력 소모량이 높아 진동에 민감하다.
- – 고정식 라이더 : 차량에 적용하기에 적합한 방식으로 평가되고 있다. 전자식으로 회전시키기 때문에 시야가 작아지지만 모터와 같은 기계 부품이 없어 더 싸고 사이즈가 작다.
빛을 활용하는 라이더는 905~1,550nm의 대역을 차량에 적용하고 있으며, 이 빛을 송출하는 방식도 회전식과 Array 방식으로 분류된다.
905nm 대역은 라이더 양산과 비용 절감에 큰 역할을 했지만 태양광과 겹치는 대역이 더 많아 노이즈 현상이 많아 결정적으로 시력 손상 가능성이 있다. 안전성 문제로 자동차 업계에서는 1,550nm 대역을 적용하기 시작했다.
1,550 nm 대역은 시력 손상 가능성은 상대적으로 적고 노이즈 현상이 적다. 하지만 원가가 높고 높은 출력으로 인해 전력 소모량이 크다는 단점을 갖고 있다. 아직 해당 기술이 완성되지 않아 표준이 정해지지 않아 다방면으로 개발되고 있으며 많은 기업이 기술개발에 나서고 있다.
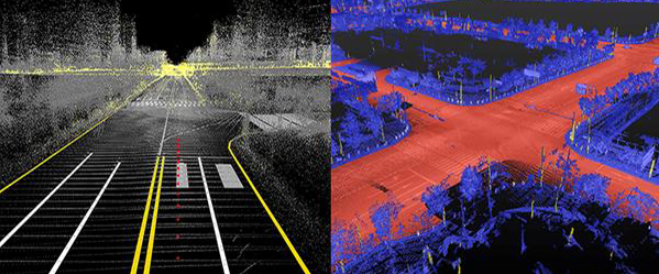
라이더센서의 미래 많은 기업이 라이더를 선호하는 것은 데이터 순환구조로 진입하기 위한 첫걸음으로 용이하기 때문이다. 라이더 센서를 통한 자율주행 시스템은 인식한 주변 환경의 이미지와 정밀지도와의 대조를 통해 차량의 위치를 파악하고 경로를 예상하는 것이 핵심이다.
이런 방식은 마치 정해지를 넓혀 주행하는 것과 같아 안전성이 높다. 하지만 사전에 지도를 구현해야 하기 때문에 정해진 지역에서 정해진 경로를 벗어나면 적용이 어렵다는 단점이 있다. 즉, 대부분의 차량이 자율주행으로 바뀌고, 차량이 수집한 데이터만으로 지도가 유지관리될 때까지는 고정밀 지도가 구축된 구역에서만 주행이 가능하다. 따라서 적어도 한 번 이상 고정밀 지도를 구축할 수 있는 대도시 중심의 국가에 적용하기 쉽다.
테슬라가 카메라와 레이더의 퓨전 방식에서 카메라만이 사용하는 ‘Pure Vision 방식’으로 전환된 이유는 데이터였다. 테슬라는 기존에 사용하던 SD 지도와 GPS로 차량의 대략적인 위치를 파악한다. 그리고 카메라를 이용해 정확한 위치와 주변 환경을 인식한다. 카메라로 얻은 데이터를 학습하고, 주변의 사물을 인식하고, 공간을 매핑한다.
이처럼 자율주행의 핵심은 결국 데이터 수집과 학습이다. 테슬라는 기술 완성 전에 많은 차량을 판매해 보다 많은 데이터를 수집, 학습해 기술 수준을 높여가는 보텀업 방식으로 데이터 순환 구조를 구축하고 있다. 라이더와 카메라, 레이더를 이용한 데이터 순환구조가 구축된 뒤에는 라이더 센서에 대한 의존성이 지금보다 낮아질 것으로 예상된다.
레이더(Radar), 라이더(Lidar), 카메라(Camera)의 장단점 비교, 센서 퓨전(Sensor Fusion)이란? http://blog. naver.com/cjsksk3113/222276697486AutomotiveSensorsRadar,Lidar,Camera 자율주행, ADAS(Adavanced Driving Assistance Sys… blog.naver.com